
|
Ph.D. Email: hwangdf@connect.ust.hk |
|
Hello, this is Hengli Wang. I got my Ph.D. degree from The Hong Kong University of Science and Technology (HKUST) in 2022, supervised by Prof. Ming Liu in RAM-LAB . Prior to this, I received my B.E. degree from Zhejiang University (ZJU) in 2018. CV / Github / Google Scholar |
|
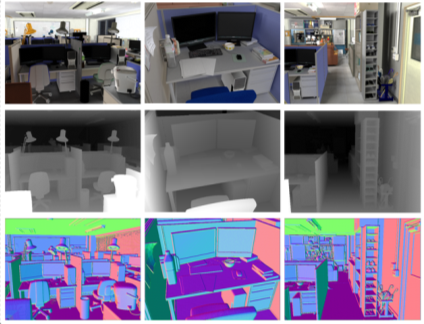
My research interest is mainly visual perception for autonomous driving. Specifically, I am working on the computation of visual features including stereo matching, optical flow estimation, and surface normal estimation. I am also focusing on improving the perception performance by exploiting the visual features, especially semantic segmentation in the image space and in the BEV space. Selected publications are shown as follows, and representative works are highlighted (* indicates equal contribution). |
|
Autonomous Driving Perception: Fundamentals and Applications, 2023 Chuang-Wei Liu, Hengli Wang, Sicen Guo, Mohammud J. Bocus, Qijun Chen, Rui Fan bibtex |
|
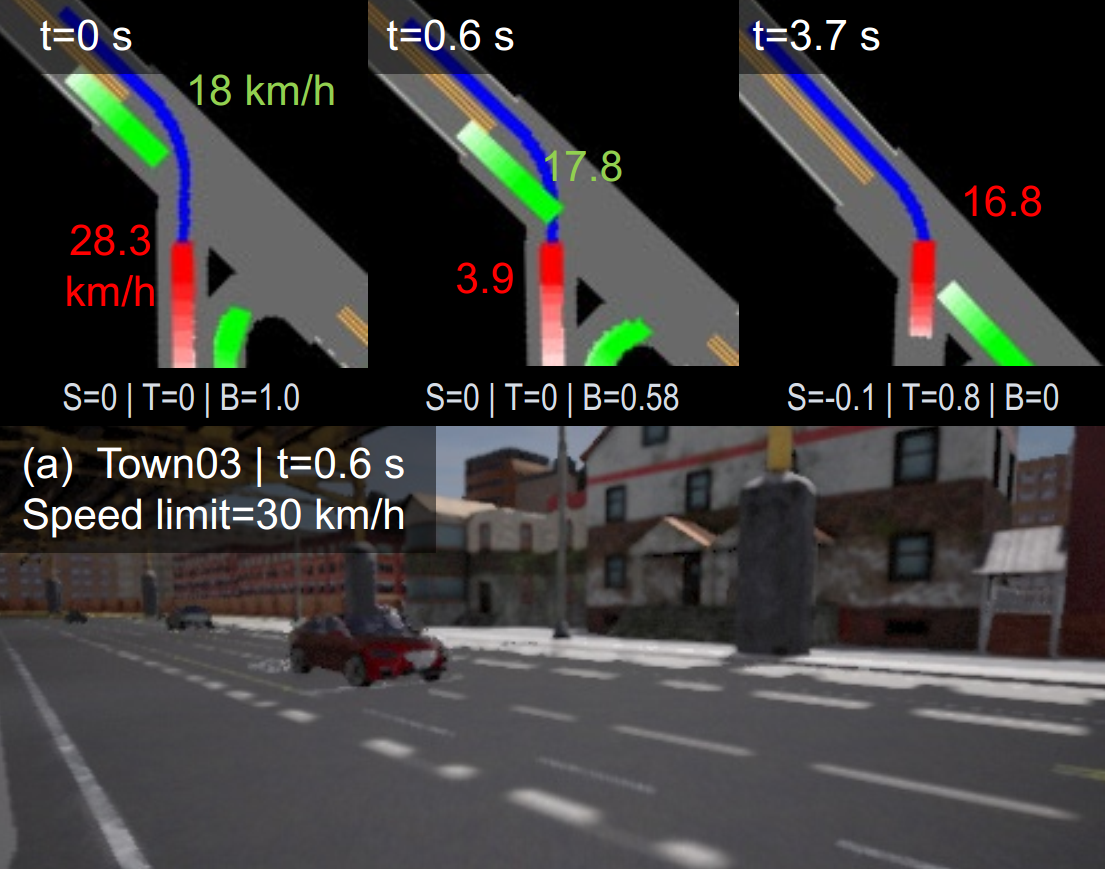
IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2022 Peide Cai, Hengli Wang, Yuxiang Sun, Ming Liu arXiv / bibtex / project page |

|
IEEE Transactions on Cybernetics (T-CYB), 2021 (IF: 11.448) Hengli Wang*, Rui Fan*, Yuxiang Sun, Ming Liu arXiv / bibtex / project page |
|
IEEE Transactions on Image Processing (T-IP), 2021 (IF: 10.856) Rui Fan*, Hengli Wang*, Yuan Wang*, Ming Liu, Ioannis Pitas arXiv / bibtex / code / dataset |
|
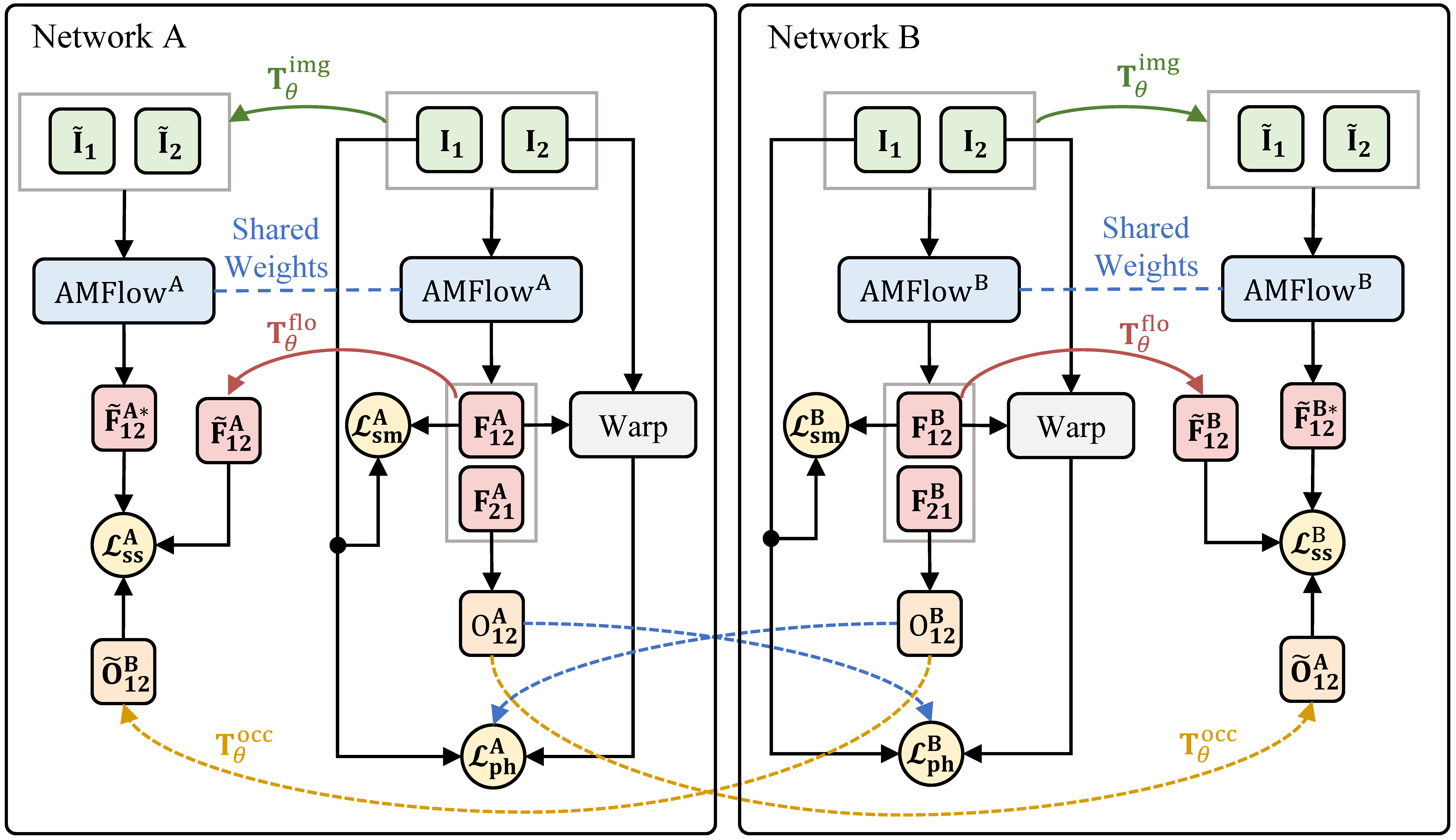
IEEE Robotics and Automation Letters (RA-L), 2021 presented at IEEE International Conference on Robotics and Automation (ICRA), 2021 Hengli Wang*, Rui Fan*, Peide Cai, Ming Liu arXiv / bibtex / project page / video |
|
IEEE Robotics and Automation Letters (RA-L), 2021 presented at IEEE International Conference on Robotics and Automation (ICRA), 2021 Rui Fan*, Hengli Wang*, Bohuan Xue*, Huaiyang Huang, Yuan Wang, Ming Liu, Ioannis Pitas arXiv / bibtex / project page / code / dataset / video |
|
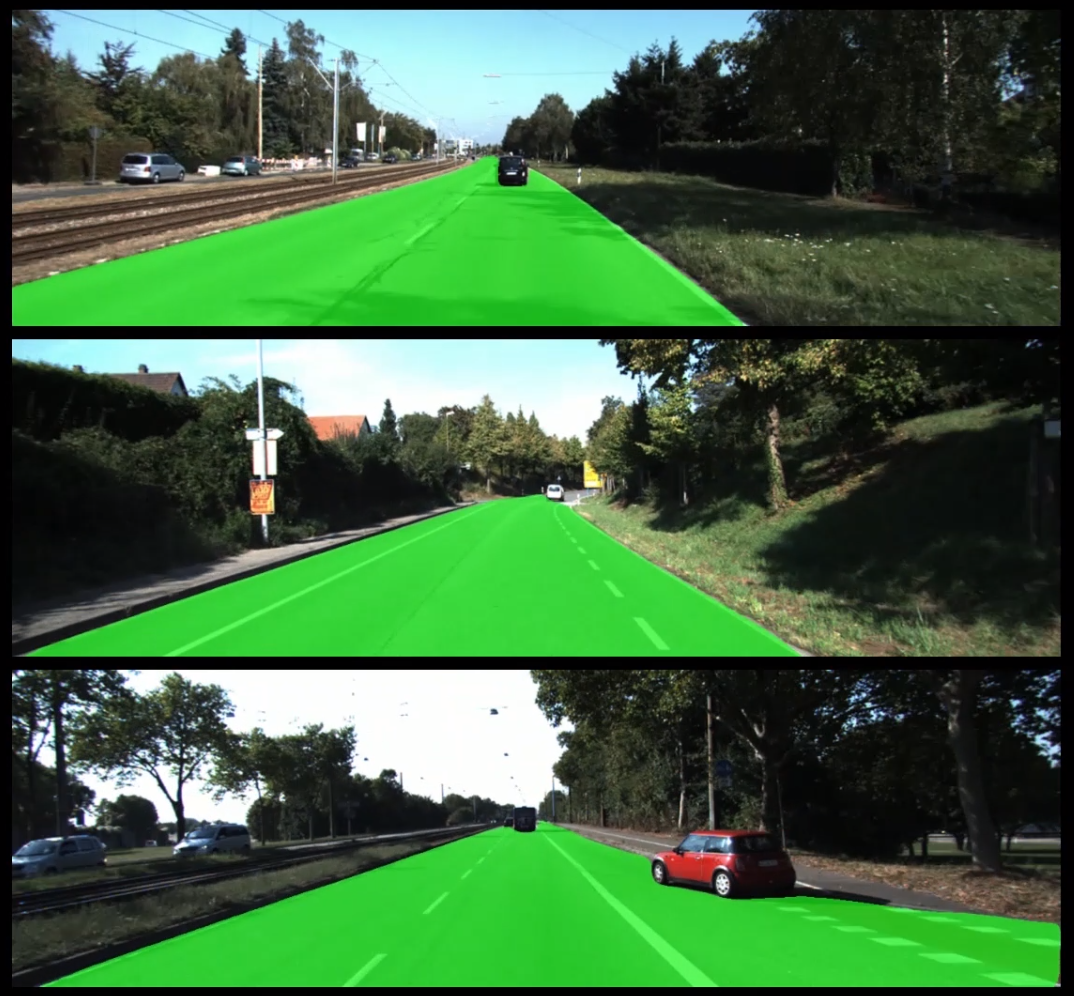
IEEE International Conference on Robotics and Automation (ICRA), 2021 Hengli Wang, Peide Cai, Yuxiang Sun, Lujia Wang, Ming Liu arXiv / bibtex / project page / video |

|
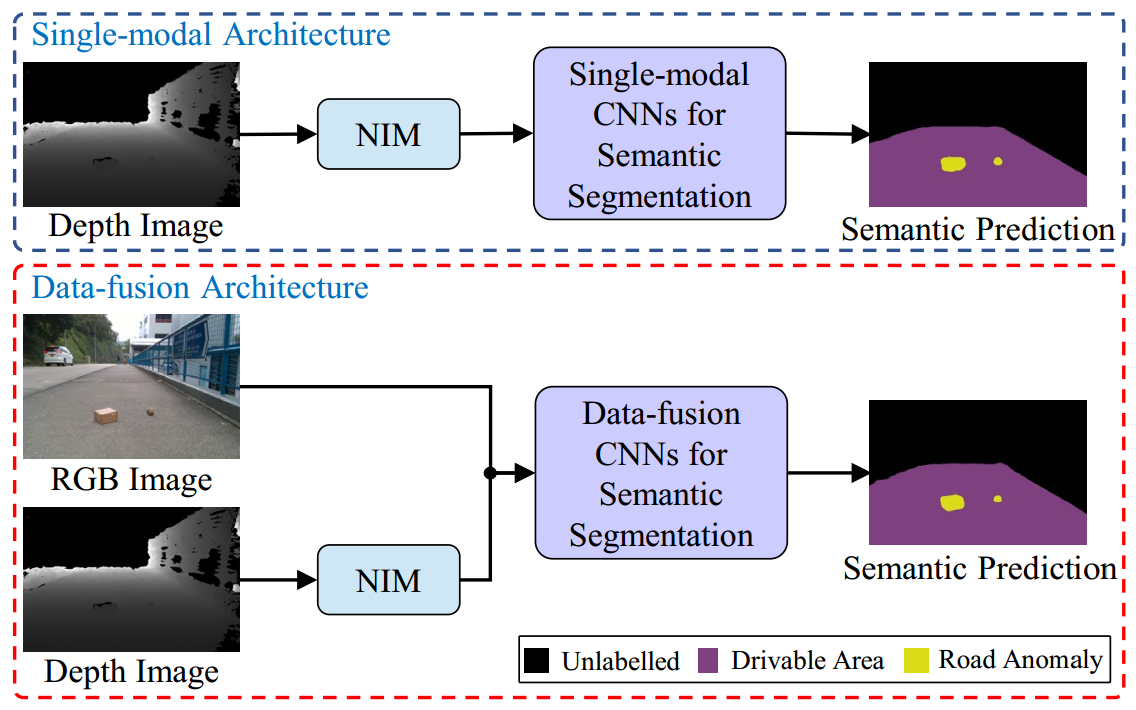
IEEE International Conference on Robotics and Automation (ICRA), 2021 Hengli Wang, Yuxiang Sun, Rui Fan, Ming Liu arXiv / bibtex / project page / video |
|
IEEE Transactions on Mechatronics (T-MECH), 2021 (IF: 5.673) Rui Fan*, Hengli Wang*, Peide Cai, Jin Wu, Mohammud J. Bocus, Lei Qiao, Ming Liu arXiv / bibtex |
|
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 Hengli Wang*, Rui Fan*, Peide Cai, Ming Liu arXiv / bibtex / project page |
|
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 Peide Cai, Hengli Wang, Yuxiang Sun, Ming Liu arXiv / bibtex / project page / video |

|
IEEE Robotics and Automation Letters (RA-L), 2021 presented at IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 Peide Cai, Hengli Wang, Huaiyang Huang, Yuxuan Liu, Ming Liu arXiv / bibtex / project page / video |

|
IEEE Robotics and Automation Magazine (RAM), 2021 presented at IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 Tianyu Liu, Qinghai Liao, ..., Hengli Wang, ..., Ming Liu arXiv / bibtex / project page / video |
|
Conference on Robot Learning (CoRL), 2020 (34% acceptance rate) Hengli Wang, Rui Fan, Ming Liu arXiv / bibtex / project page / video |
|
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020 Hengli Wang*, Rui Fan*, Yuxiang Sun, Ming Liu arXiv / bibtex / code |
|
European Conference on Computer Vision (ECCV), 2020 Rui Fan*, Hengli Wang*, Peide Cai, Ming Liu arXiv / bibtex / project page / code / dataset / video |
|
European Conference on Computer Vision (ECCV) Workshops, 2020 Hengli Wang*, Yuxuan Liu*, Huaiyang Huang*, Yuheng Pan*, Wenbin Yu, Jialin Jiang, Dianbin Lyu, Mohammud J. Bocus, Ming Liu, Ioannis Pitas, Rui Fan arXiv / bibtex / project page / dataset / video |
|
European Conference on Computer Vision (ECCV) Workshops, 2020 Rui Fan*, Hengli Wang*, Mohammud J. Bocus, Ming Liu arXiv / bibtex / project page / code / dataset |

|
IEEE Transactions on Intelligent Vehicles (T-IV), 2020 Peide Cai, Yuxiang Sun, Hengli Wang, Ming Liu arXiv / bibtex / project page / code / dataset / video |

|
IEEE Transactions on Automation Science and Engineering (T-ASE), 2020 Yuxiang Sun, Weixun Zuo, Peng Yun, Hengli Wang, Ming Liu pdf / bibtex / video |

|
IEEE Robotics and Automation Letters (RA-L), 2019 Hengli Wang, Yuxiang Sun, Ming Liu arXiv / bibtex / code / dataset |
|
|
|
|